 USD
USD
Estacion de carga y descarga de robot portico


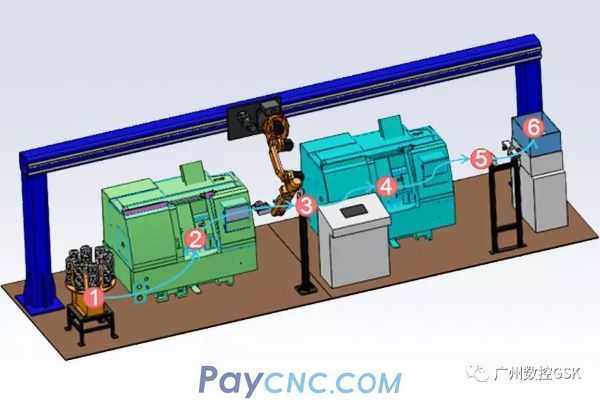

El contenedor de carga se llena manualmente, y el robot toma secuencialmente los espacios en blanco para agregarlos uno por uno;
La pinza de aire 1 de la pinza de robot 1 toma los espacios en blanco y espera fuera de la puerta del torno 1. El procesamiento del producto semiacabado en el torno 1 se completa, la puerta del torno se abre, la pinza de aire 2 retira la semi -producto terminado después de que se completa el torno 1, y reemplaza la pinza superior 1 Para las partes ásperas, el robot agarra el torno, la puerta del torno se cierra y el OP10 comienza a procesar OP10;
La pinza 2 de la pinza robot 1 coloca el producto semiacabado en un lado de la mesa de inversión y luego usa la pinza 1 para agarrar el producto semiacabado del otro lado; la pinza 1 de la pinza robot 1 agarra el producto semiacabado y espera afuera de la segunda puerta del torno. Se completa el mecanizado de la segunda pieza de trabajo, se abre la segunda puerta del torno, la pinza 2 retira el producto terminado del segundo torno y se reemplaza el producto semiacabado de la pinza superior 1. El robot agarra el segundo torno, la segunda puerta del torno se cierra y el segundo comienza a procesar OP20. ;
El producto terminado de la pinza de aire 2 de la pinza de robot 1 se transporta a la mesa de almacenamiento temporal de la mesa de colocación de agarre, y el robot se reemplaza con la pinza de robot 2;
La pinza 3 de la pinza robot 2 transporta el producto terminado al contenedor de descarga;
El robot se reemplaza con un manipulador 1;
Repita los pasos anteriores.

El robot GSK RB08A3 utiliza la herramienta de doble sujeción final para agarrar la cubierta del extremo del motor y alimentarla a la máquina herramienta para procesarla en la armadura. Al mismo tiempo, realiza el corte automático.

Especificaciones ·
GSKRB08A3 Universal Robot
Número de ejes móviles: 6 ejes.
Carga máxima: 8 kg
Precisión de posicionamiento repetida: ± 0.05 mm
Los robots de manipulación se utilizan ampliamente en sistemas de manipulación automática, como la carga y descarga de máquinas, y las líneas de producción de prensas;
· Ventajas del producto ·
Utilización mejorada de la máquina y calidad del producto;
Coloque dos juegos de agarres, uno para cargar y descargar, y el otro para empacar. Use herramientas de cambio rápido para cambiar entre los agarres;
La consistencia de alta calidad reduce el riesgo de piezas defectuosas traídas por los trabajadores;
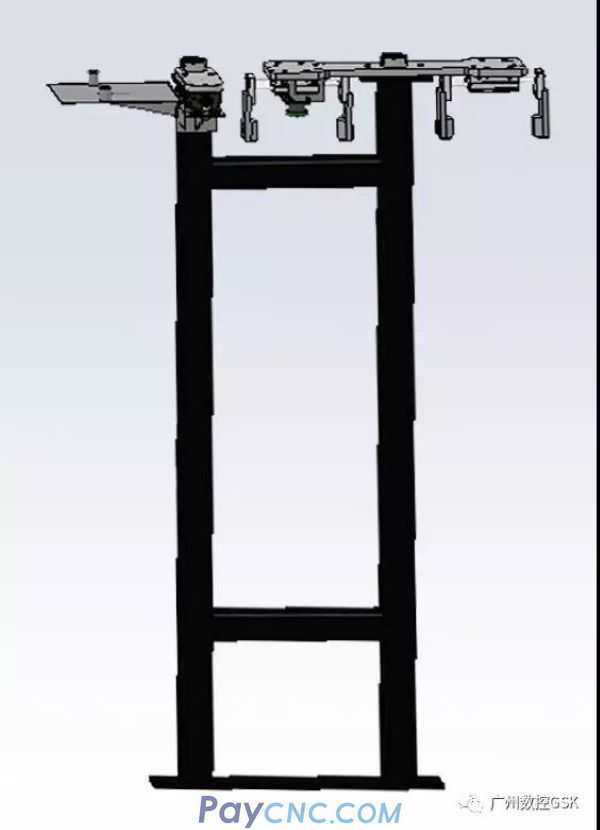
La estación de trabajo móvil de pórtico aprovecha al máximo el espacio superior de la máquina herramienta, liberando espacio de trabajo en el terreno, facilitando el mantenimiento de equipos como máquinas herramientas y una mayor tasa de utilización de los equipos en comparación con las soluciones de automatización general.
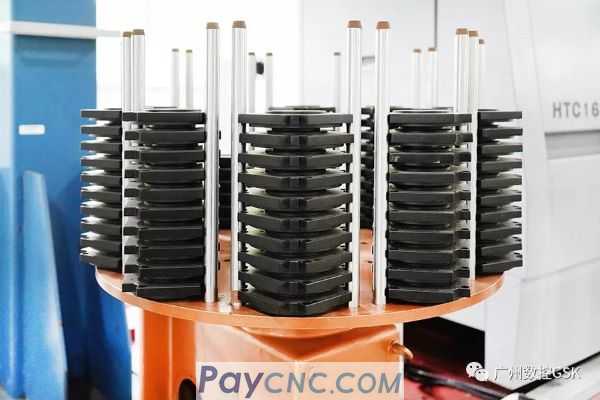
Silo de carga
La rejilla automática utiliza una rejilla giratoria laminada. Al tiempo que garantiza la precisión de la carga, la columna de posicionamiento debe ajustarse al reemplazar diferentes tipos de piezas. Como se muestra en la figura, el bastidor giratorio apilado está controlado por un servomotor y el sistema.
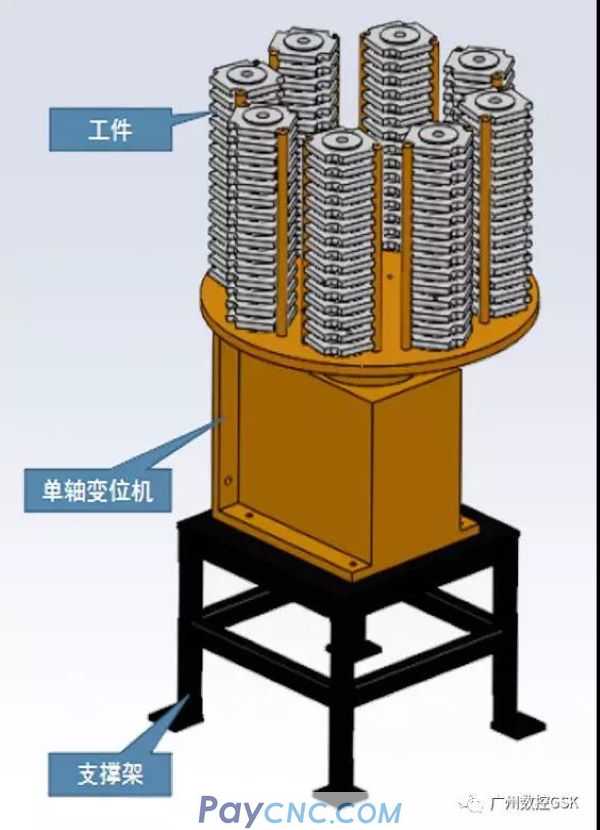
El trabajador abandona el silo lleno de espacios en blanco y hojas.
Cuando trabaja, el robot agarra los espacios en blanco de arriba a abajo. Después de agarrar la pila de espacios en blanco, el estante de almacenamiento gira automáticamente una estación.
El sensor en el estante de almacenamiento puede detectar automáticamente el nivel de material. Si el sensor no detecta el material durante un minuto, enviará una señal de advertencia para recordarle al trabajador que agregue material al silo.
Si no se detecta material durante tres minutos, se envía una señal para detener la máquina. Toda la máquina está diseñada con múltiples protecciones, lo que es seguro y confiable.
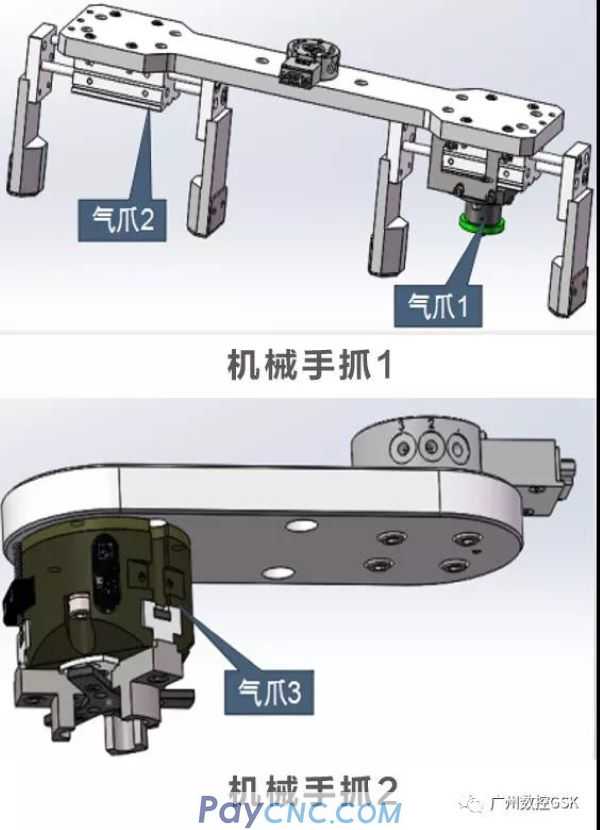
Agarre robótico
De acuerdo con la colocación de la pieza de trabajo en el accesorio de la máquina herramienta y el silo, se requieren 2 juegos de pinzas para satisfacer las necesidades de producción

Instrucciones de herramientas
El mango del manipulador 1 adopta una estructura de doble pinza para realizar un reemplazo rápido de las piezas de trabajo en la máquina herramienta, lo que ahorra mucho tiempo de reemplazo de material y mejora la utilización de la máquina herramienta
La empuñadura manipuladora 2 adopta una estructura de agarre único, que puede moverse con flexibilidad después de agarrar la pieza de trabajo, y puede colocar la pieza de trabajo en el compartimento inferior.
Conmutador
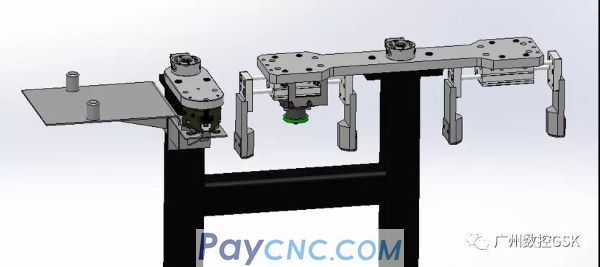
La estructura de la estación de inversión se muestra en la figura de la derecha. La estructura es simple y el costo es bajo.

El robot coloca la pieza de trabajo en una mesa de inversión y luego toma la pieza de trabajo del otro lado
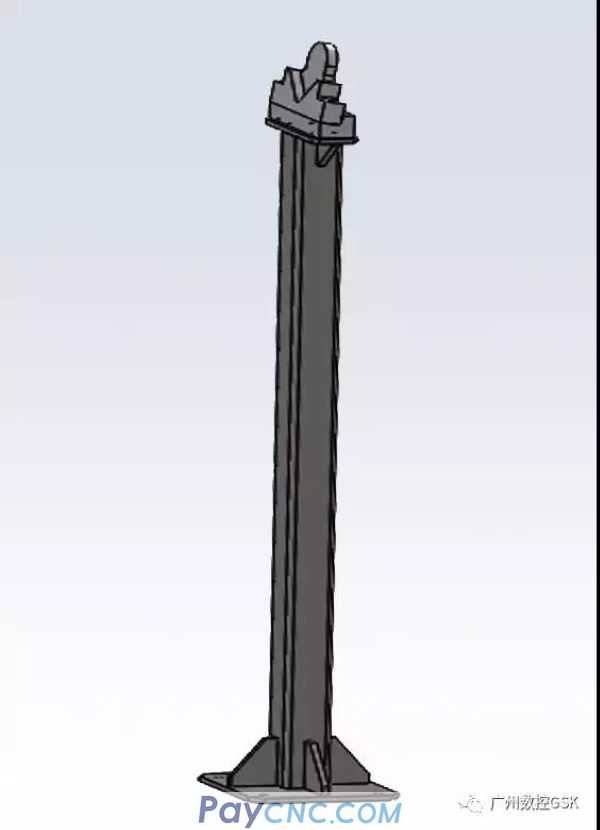
Soporte de cambio rápido
La estructura de la mesa de mano se muestra en la figura izquierda, y la estructura es simple y práctica.

Flujo de trabajo
Durante el trabajo, el robot coloca la pieza de trabajo en la mesa de almacenamiento temporal. El robot mueve la pinza 1 a la posición correspondiente, libera el dispositivo de cambio rápido, luego se mueve hacia la parte superior de la pinza 2 y cierra el dispositivo de cambio rápido. Para reemplazar la pinza
Silo de descarga
La estructura del contenedor de descarga se muestra en la figura, la estructura es simple y práctica.
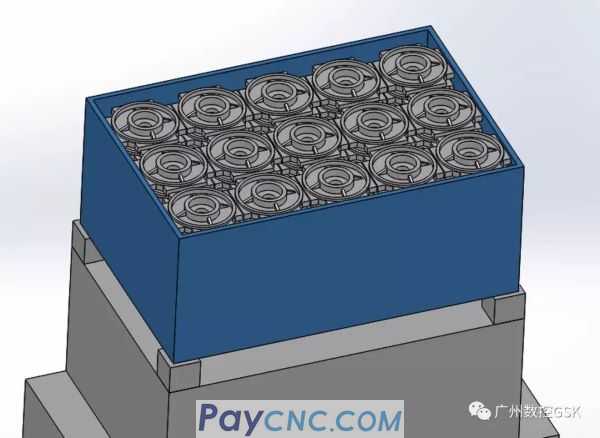
Flujo de trabajo
Coloque la caja vacía en el soporte de posicionamiento manualmente;
Durante el trabajo, la programación es realizada por el colgante de aprendizaje del robot, y el robot paletiza automáticamente el producto terminado;
Cuando la caja esté llena, use una carretilla elevadora para separarla manualmente.




