USD
USD
How to set indexing table on GSK218MC CNC

To use the indexing table, the parameter K14.0 needs to be modified to 1 to be effective, as shown in Figure 1;

The release code of the indexing table is M11, and the clamping code is M10;
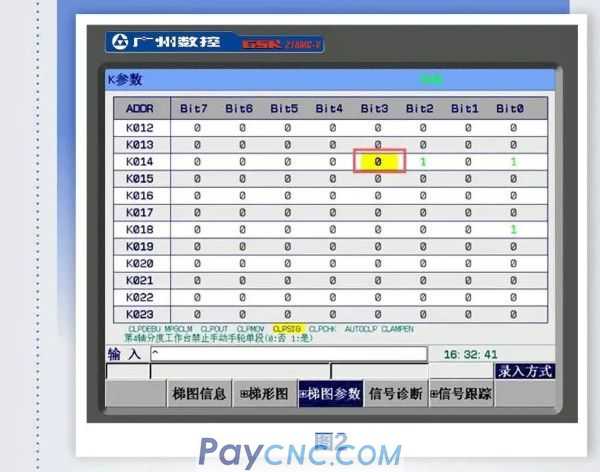
When using the indexing table, if the indexing table is clamped, the fourth axis is not allowed to rotate in any way. When the indexing table is released, the program can be executed to rotate the fourth axis, and the parameter K14.3 is used to determine whether to allow After loosening, use the handwheel to manually rotate the fourth axis, as shown in Figure 2;
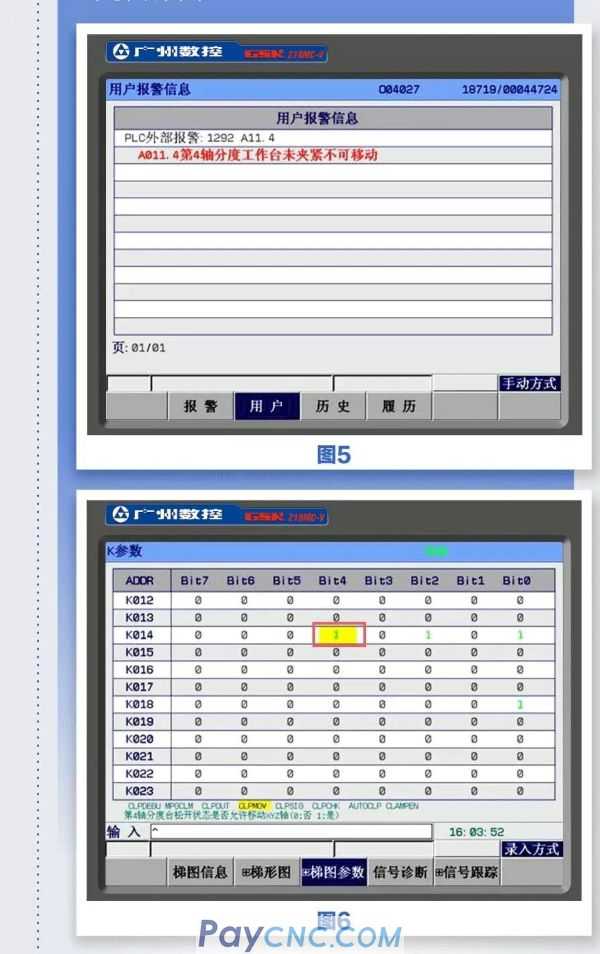
If you need to debug the fourth axis rotation, change K14.7 to 1, as shown in Figure 3, enter the workbench indexing table debugging mode, and the PLC quote A20.1 appears, as shown in Figure 4, the alarm is ignored, and the manual handwheel mode is now The fourth axis can be moved freely, without interlocking with the signal of loose clamp in place;

When the indexing table is released, an alarm will appear when moving XYZ, as shown in Figure 5, no movement is allowed. If the user does not need this restriction, just modify K14.4 to 1, as shown in Figure 6;
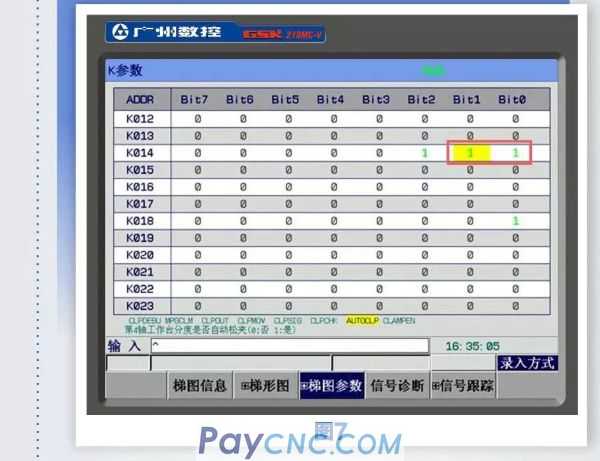
The indexing table automatically releases the clamp, and the M10 and M11 codes can still be used to release the clamp when using the automatic release mode of the indexing table; the fourth axis must be set as the rotary axis and four linkages to use the automatic clamp release device of the worktable. Set the following parameters: set K14.0 to 1, and set K14.1 to 1, as shown in Figure 7.
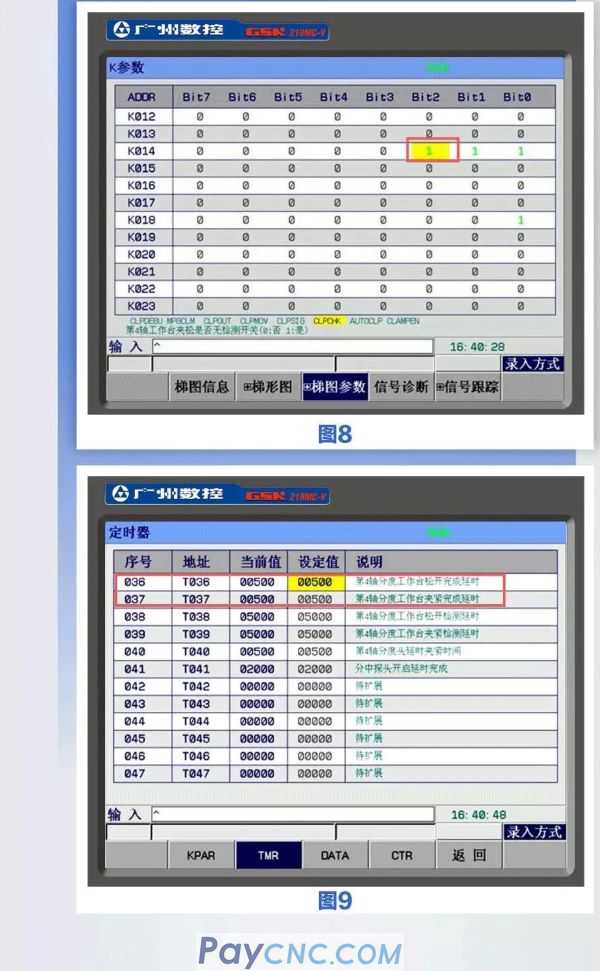
The indexing table does not need to install the release and clamp detection switches. When the switch is not installed, the parameter K14.2 needs to be modified to 1, as shown in Figure 8. When the switch is not installed, the timers T0036 and T0037 are used as virtual releases. In-position and clamping-in-position delay detection, the user needs to set this time according to the speed of the mechanical action, the default is 500ms, as shown in Figure 9;